- 已发布 2024年4月29日
- 最后修改 2024年4月29日
- 5 分钟
什么是机器人零件?机器人控制器、传感器和机器人关节

本指南是我们工业自动化中心的一部分,您可以在那里了解更多关于人工智能、自动化和控制的知识。
在本指南中,我们将介绍一些最常见和流行的机器人零件和组件,同时识别一些不同基本机器人类型以及它们在现代工业中通常扮演的角色。
什么是机器人零件?

随着工业机器人多年来在复杂性和功能上不断发展,它们已经极其熟练地执行的广泛能力和角色范围也呈指数级增长。
与此同时,即使在过去的十年里,随着技术的不断进步,机器人设计和制造中许多关键组件的制造成本 - 尤其是传感器 - 开始大幅下降。在工业领域,结果是机器人和机器人零件在各种行业的供应和可负担性迅速扩大。
现在,甚至在规模较小的操作中,传统手动生产过程中的机器人和机器人元素比以往更常见,因为它们现在不再如过去那样价格高昂,只适合那些产量和营业额异常高的企业才能使用。
无论它们是多么复杂或相对简单的机器,所有机器人基本上都包含几个对任何类型机器都通用的关键部件。简而言之,在任何可编程的工业机器人中,都会始终存在:
- 作为机器“大脑”的控制器
- 一系列机械零件和附件,旨在执行预先编程的关节动作
- 一些传感器的组装,以帮助机器人微调其响应外部刺激的性能
上面提到的“对外部刺激的反应”是定义机器人和机器人部件与其他高科技组件的重要因素。有趣的是,到目前为止,关于什么是机器人本身,与仅仅能够执行重复任务以达到一致标准的机器之间究竟有何差异,还没有一个非常标准化的共识。
确定我们广泛认为的“机器人学”中的关键因素是机器自主感知和对其环境的某些方面做出反应的能力。例如,毫无疑问的是,我们通常不认为电水壶是一种机器人,即使它在我们的最少干预下(除了最初的指令)执行可重复任务以达到一致的标准。
许多类型的“智能”技术现在通过其在其直接环境中监测和响应变化的能力,使简单机械与真正的机器人学之间的界限变得模糊起来。再次提醒,这部分原因在于今天传感器技术的制造变得更加广泛和可接受,这比十年前还难以想象。
机器人的基本部件
如上所述,无论安装在何种复杂的机器中,机器人的核心部件基本上是一致的。实质上,将一直存在着:
- 一个控制器(通常是计算机和软件包)来向机器人传达命令。
- 让它执行指定任务的物理结构和机械组件(电机、活塞、轮子、外壳和各种其他工具和“末端执行器”部件)。
- 各种传感器、测量设备和可调响应仪表,使机器人能够理解和响应对于人类来说是本能的环境因素,例如方向、温度、压力、大小等。
当然,以上只是一个非常广泛的类别列表。在下面的部分中,我们将更具体地看一些最常用的机器人部件,这些部件在部署在数不清的工业和实验室环境中的各种机器中都能找到。
机器人手臂

机器人手臂是被编程来快速、高效、极其准确地执行特定任务或工作的机器。通常由电机驱动,它们最常用于在较长时间内快速、一致地执行特别重型、精细和高度重复的程序。它们在工业生产、制造、加工和装配领域特别受重视。
用于工业生产、装配或拾取放置应用的大多数机器人手臂都有4-6个关节,旨在模仿人类手臂和手的基本功能。常见类型的工业可编程机器人手臂包括Cartesian、极坐标、柱坐标和SCARA手臂,每种手臂在不同形状和协调的物理空间“包络”中进行操作,以执行其主要任务-您可以在本指南结尾了解更多关于这些机器人类型的信息。
要更详细地了解这个主题,请参阅我们的机器人手臂指南。
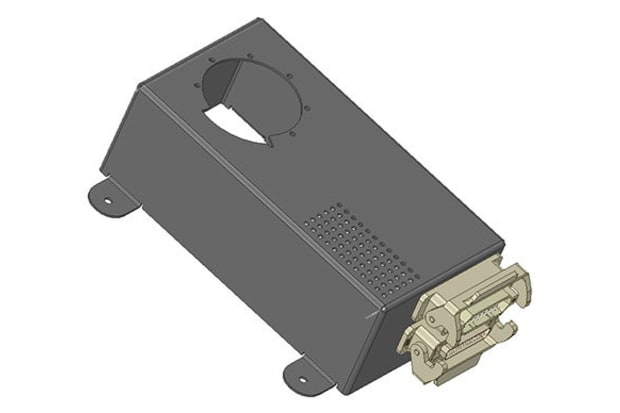
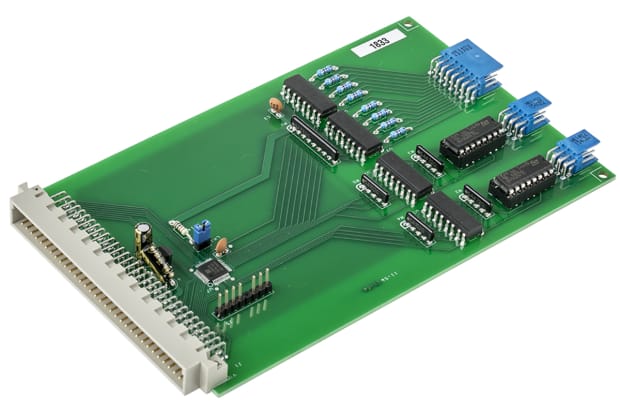
机器人控制器和控制系统

机器人控制器可以采用多种形式,但在现代工作场所中,它们几乎总是涉及硬件和软件的组合,共同构成数字计算机系统,通过这个系统对机器人进行指示和监控。
如上所述,这里最接近于人类的类比是大脑-控制器产生和发送的信号直接管理所有其他机器人部件的运动,包括关节、操纵器和任何末端执行器附件。
实质上,正是机器人控制器使得一个配备适当设备的机器成为机器人,尤其是在与传感器结合使用的情况下,使其能够自动调整到外部事件和条件。
机器人控制系统大致分为两个主要类别,即:
- 预编程控制系统
- 简单的预编程机器人仅设计用于重复相同的基本操作,它们只能以非常有限的方式(如果有的话)对外部环境的变化做出反应。换句话说,它们需要维持适当的条件来正确执行其预定任务。
- 自主机器人控制系统
- 更复杂的自主机器人将配备一系列传感器和其他设备,使它们能够检测和响应外部因素或环境变化。
机器人夹持器

机器人夹持器只是众多类型的操作器之一,可以安装在机器人或机械臂的末端执行器(“手部”)上,从而赋予它特定的关键功能和能力。机器人夹持器为机器提供了在广泛的物体和零部件上获得可靠抓取的手段,这对于大多数生产线、装配和拾取放置应用来说是至关重要的。
它们通常设计为电动操作、气动操作或基于真空原理 - 与大多数机器人零件一样,对于特定应用来说,最佳解决方案取决于任务的具体性质和机器人所要工作的环境的具体情况。
机器人关节和电动机
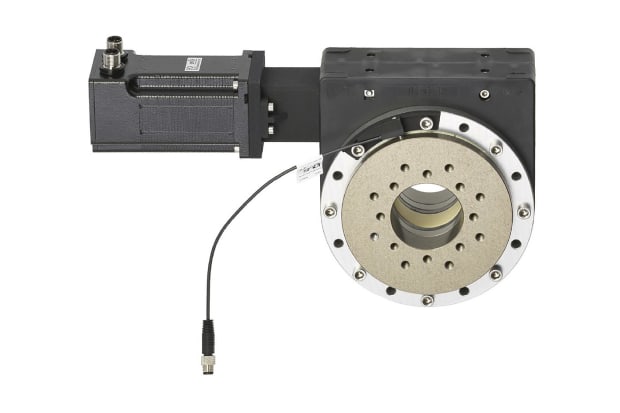
机器人关节和电动机赋予这些机器宝贵的能力,能够一次又一次地执行极其精确、可重复的运动。可从机器人供应商处购买各种类型的电动机 - 也称为执行器,选择合适的类型将取决于您想让机器人执行的运动类型和范围的几个关键因素。
可用的基本类型的机器人电动机包括:
- 交流电机或直流电机
- 伺服电机
- 一个交流、直流或无刷直流电机与位置传感器和控制电路相结合。伺服电机是一个旋转执行器,允许对角位置进行精确控制。电机通过齿轮连接到控制轮,当电机旋转时,位置传感器的电阻会发生变化,因此控制电路可以精确调节移动。
- 通常与伺服驱动控制结合使用,这是一种用于供电和监控伺服机构反馈的电子放大器。
- 步进电机
- 一种将完整旋转分成若干等步的无刷直流电机。然后可以使电机的位置移动和保持在其中一个步骤上,而不需要任何位置传感器进行反馈。
- 通过计算机控制步进,这些电机可用于实现非常精确的定位和/或速度控制,在许多机器人应用中非常理想。
- 直线执行器
- 直线执行器产生直线运动,并已被设计成能够承受各种工作条件。执行器通过将电机产生的能量转化为扭矩,从而移动机构。
- 执行器的控制系统可以通过机械、电气或软件来处理。
机器人传感器和传感器器

在与人类能力进行比较方面,机器人可以很容易地装配各种传感器、镜头和其他附件,使它们能够接触到我们拥有的许多基本感官 - 视觉、听觉、触觉等。更为困难的问题是教导机器人如何理解和利用它接收到的数据。
市面上各种机器人传感器可以分为各种关键类别,其中可能包括:
- 接触传感器
- 按钮和接触开关
- 压力垫和传感器
- 距离传感器和测量仪器
- 超声波测距仪
- 红外线传感器
- 激光测量设备和传感器
- 拉伸和弯曲传感器
- 定位传感器
- 室内导航传感器
- GPS和其他实时跟踪设备
- 旋转传感器
- 电位器
- 陀螺仪设备
- 环境传感器
- 光电传感器
- 声音传感器
- 热传感器和热像仪
- 湿度和湿度传感器
- 压力传感器
- 气体传感器
不同类型的机器人
在现代工业和工作场所中使用了许多不同类型的机器人。在这一部分,我们将看一些更常见的类型以及它们通常执行的角色。
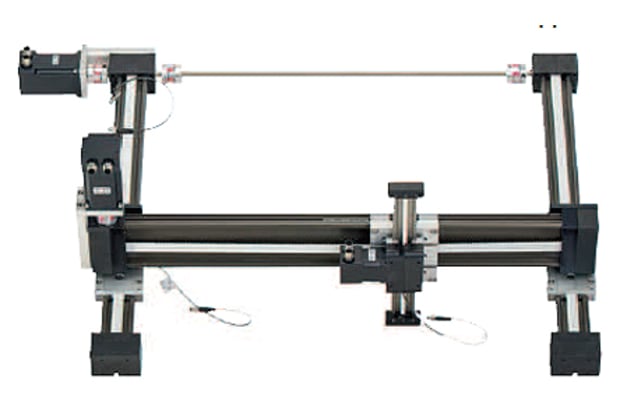
Cartesian机器人
Cartesian机器人之所以被如此称呼,是因为它们基于Cartesian坐标系运行 - 换句话说,它们的运动沿着我们习惯在大多数图表和三维图表上看到的 X、Y 和 Z 轴进行规划和控制。它们通常用于执行诸如机床加工或拾取和放置等任务。
因此,Cartesian或龙门机器人的关节和电机是使用 X、Y 和 Z 坐标进行编程,以实现在这三维空间中的线性运动,有时另外加上一个旋转腕关节,以获得更大的灵活性。一系列的线性执行器使得龙门机器人能够在三维空间中准确定位工具或附件,并通过一系列线性运动来操纵它以在不同位置之间切换。
圆柱机器人
圆柱机器人是沿着一组轴进行编程,使其能够在一个圆柱形的“工作包络”内执行任务。圆柱形的工作包络是机器人的潜在操纵空间的大小和形状的机器人设计术语。对于圆柱机器人来说,这个工作包络是圆柱形的,这意味着机器人可以沿着中心轴的上下和周围进行运动。
通过包含旋转和棱柱关节,圆柱机器人具有旋转和线性运动的潜力。这种类型的机器人广泛应用于点焊和机器工具处理等领域。
极坐标机器人
极坐标或球形机器人是指通过旋转关节、两个旋转关节和一个直线关节的组合,实现在球形工作空间内运行的机器人。其随后的球形工作空间使其能够执行类似于圆柱形机器臂所述角色的任务,只是在工作空间内具有更大的前后移动能力 - 这经常标志着极坐标机器人特别适合处理机床、点焊、压铸和弧焊应用。
SCARA机器人
SCARA是选择性服从装配机器人臂(有时也是选择性服从关节机器人臂)的首字母缩略词。在机器人领域,“服从”指的是运动中的一定程度的允许灵活性,而SCARA机器人被设计为在一个或两个方向上允许一定程度的服从,同时在其他轴线上保持绝对刚性。在某些装配或零件放置任务中,这可能非常有用,因为选择性服从意味着密合的零件可以被无损伤地插入到非常严格容差的任务中。